科学家研制腿式小天体着陆机构用于着陆模拟和实验测试
稳定着陆是小天体原位探索的前提。小天体表面重力弱且不规则,表面环境未知且不确定。着陆机构容易反弹、翻转,着陆稳定时间长。然而,月球和火星表面存在差异,目前大多数着陆性能研究都集中在月球着陆上。因此,研究不同条件下的着陆性能,分析着陆稳定性边界,提出合理的着陆建议,对支撑我国小天体探测具有重要意义。近日,北京航天器系统工程研究所、哈尔滨工业大学、米兰理工大学的研究人员在《Space: Science & Technology》发表研究文章,建立了不同着陆条件下着陆机构的仿真模型,分析了着陆机构的灵敏度。影响着陆性能的关键参数,并通过实验测试验证模拟的正确性,为着陆机构在小天体上稳定着陆提供建议。
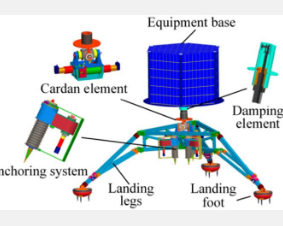
首先,作者简要介绍了着陆机制和着陆模拟。模拟中使用的小天体着陆机构包括着陆脚、着陆腿、万向元件、阻尼元件、设备底座等(图1)。在模拟中,考虑两种情况,即(1)着陆机构朝着陆坡度着陆且V x > 0和(2)着陆机构远离着陆坡度着陆且V x < 0。在每种情况下,根据着地脚与着地坡面的接触顺序,分为三种着地方式,即(a)1-2着地方式、(b)2-1着地方式、(c)1-1-1着地方式(具有 30° 偏航角)。对于两种模拟场景中的所有着陆模式,着陆机构翻转都被后向火箭阻止,并且着陆脚没有滑动。详细着陆性能总结如表1所示。设备底座最大过载加速度小于10 g,着陆稳定时间小于4 s。表明该着陆机构在不同着陆条件下均能安全着陆。另外,当V x > 0时,可以看出,2-1模式在三种模式中具有最好的着陆性能,并且1-2和1-1-1模式的着陆性能相似。当V x < 0时,2-1模式的着陆性能最好,1-2模式一般,1-1-1模式最差。
其次,分析了影响着陆性能的关键因素。(1) 万向元件阻尼 ( c 2 )。与常数c 2 相比,当c 2变化时,着陆稳定时间显着缩短,过载加速度减弱。当c 2 变化时,该着陆机构具有更好的着陆性能。(2) 脚锚。脚锚影响着陆脚和着陆表面之间的摩擦系数。滑移会导致着陆机构远离着陆点,从而影响锚固系统的锚固效果。着陆机构与着陆面之间的摩擦力应较大,以避免着陆机构滑动。由于高摩擦力而导致的着陆机构翻转可以通过反火箭推力来消除。因此,在着陆机构上设计脚锚是有帮助的,因为它可以穿透着陆表面并防止或减弱着陆机构的滑动。(3) 火箭后推力。火箭后推力可以防止着陆机构弹跳或转动,从而有助于着陆成功。(4) 着陆坡度。倾斜角越大,着陆腿转弯角速度越大,着陆稳定时间越长。坡度角度对设备底座超载加速度影响不明显。因此,应选择坡度较小的着陆面,以减少着陆稳定时间。(5)着陆姿态。着陆机构在允许着陆速度内以不同着陆姿态着陆时,最大过载加速度小于10g,着陆稳定时间小于5s。着陆性能良好。当偏航角为60°时(即2-1着陆方式),着陆机构过载加速度最小,着陆稳定时间最短,着陆性能最好。
然后通过试验验证了仿真模型的有效性。这些测试是在气浮平台上进行的。着陆加速度由加速度传感器测量。着陆机构的着陆姿态和传感器位置如图 2 所示。 30°斜坡上以 1-2 模式、1-2 模式和 1-1-1 模式着陆的测试为分别进行。这些着陆模式和速度被导入到仿真模型中。比较了测试和模拟之间的着陆性能。仿真得到的设备底座的过载加速度与试验得到的接近,且仿真结果略大于试验。这是由于着陆机构的机械柔性,在试验中会产生柔性变形,吸收部分冲击载荷。仿真和试验中着陆腿翻转角速度和翻转角度的变化比较一致。但在1-2模式下约0.7至2.5秒之间的时间,在2-1模式下约0.5至2秒之间的时间,以及在1-1-1模式下的同时过程中,测试中的着陆腿翻转角度较小比模拟中的要好。原因是试验中着陆面为硬木,脚锚未能穿透硬木,导致着陆机构出现轻微滑移。另外,发现2-1着陆方式的稳定时间最短,且超载加速度与着陆方式之间没有明显的关系。
最后,作者得出结论,以下方法有助于提高着陆性能:(a)三腿着陆机构应优先选择2-1着陆模式。(b) 根据着陆情况可调阻尼,有助于提高着陆稳定性。(c) 脚锚可以减少着陆滑移并缩短着陆稳定时间。(d) 着陆机构顶部的后退火箭可以减弱或防止着陆时的反弹。(e) 着陆机构应优先在平坦区域着陆。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
作为全部11支MotoGP车队及90% Moto2和Moto3车队的供应商,布雷博如今已成为顶级摩托车赛事的技术标杆。全球制...浏览全文>>
-
(2025 年 6 月 14 日,广州)6 月 14 日晚,华语摇滚乐坛标志性人物苏见信(信)携「尽兴而活」巡回...浏览全文>>
-
(2025 年 6 月 14 日,广州)6 月 14 日晚,华语摇滚乐坛标志性人物苏见信(信)携「尽兴而活」巡回...浏览全文>>
-
淮北威然是一款备受关注的商务MPV车型,以其宽敞的空间、豪华的内饰和卓越的舒适性吸引了众多消费者的目光。对...浏览全文>>
-
途观X作为上汽大众旗下的高端轿跑SUV,凭借其独特的设计和强劲的性能吸引了众多消费者的关注。在淮南地区,途...浏览全文>>
-
探岳X作为一款备受关注的中型SUV,凭借其时尚的设计和出色的性能,在市场上一直拥有不错的口碑。对于有意购买...浏览全文>>
-
2025款大众高尔夫GTI作为一款备受关注的高性能紧凑型轿车,在汽车市场中一直占据着重要地位。对于安徽亳州地区...浏览全文>>
-
池州长安启源C798作为一款备受关注的新能源车型,在市场上一直保持着较高的热度。随着消费者对新能源汽车需求...浏览全文>>
-
安徽池州地区的汽车市场近期迎来了一波喜讯,2025款高尔夫GTI的新车报价再次刷新了消费者的期待。这款备受瞩目...浏览全文>>
-
济南揽境作为一款备受关注的中大型SUV,其2025新款在外观设计、内饰配置以及动力性能方面均进行了全面升级。新...浏览全文>>
- 三星获得基于一天中的时间和天气的人工智能壁纸功能专利
- 如何将陶瓷融入室内设计
- 努萨海滨豪宅标价 2000 万美元
- 三星 Galaxy S25 Slim:泄露 iPhone 17 Air 竞争对手的旗舰相机规格
- AMD Radeon RX 8800 XT 参考设计在意外广告中泄露
- M3 Touring 与 RS4 Avant:终极冬季测试
- 量产版 Corvette 仅用了令人震惊的 2.3 秒就从 0 加速到 60 英里/小时
- 婴儿潮一代希望房价上涨
- 购买 OnePlus 12 可节省 250 美元
- 更新后的奥迪 E-tron GT:性能和价格均有所提高
- 达尔文市场将在 2025 年回暖
- Circle to Search 可能看起来更像 Apple Intelligence
- 2023年财富全球论坛荣耀对可折叠智能手机等的预测
- TECNO Spark Go 2024配备6.6英寸90Hz显示屏立体声扬声器在发布前预告
- 橡树城改造扩大到包括豪华生活的定制住宅
- Netflix将哈迪斯时空幻境和死亡之门添加到其游戏库中
- 联想Legion Go发布时间表已公布并列在该公司的官方网站上
- 苹果手表最佳优惠
- Stardock发布Fences5预览版现已适用于Windows11和10
- 揭晓Scout重新定义冒险骑行的终极步进电动自行车