科学家提出智能反馈估计方法实现卫星姿态识别与预测
近地轨道(LEO)卫星的定姿对于通信、机动、遥测等正常运行至关重要。通常情况下,卫星上装有红外地球敏感器和星敏感器,可以实现实时精确定姿。时间。但在卫星服役末期,或卫星电子系统发生严重故障时,定姿系统将无法正常工作。在此过程中,在没有传感器辅助的情况下,准确预测卫星姿态非常关键,有助于判断卫星碎片情况,预估着陆区,提前减少碎片造成的损害。在最近发表在Space: Science & Technology上的一篇研究论文中北京航空航天大学龚胜平提出了一种反馈姿态预测算法,实现当前和持续姿态的高精度预测,并设计了基于EKF的高阶力矩辨识框架,降低观测噪声,有效提取不确定环境力矩。
首先,作者回顾了 LEO 中考虑的环境力矩。对于LEO航天器,主要考虑气动力矩和重力梯度力矩。重力梯度力矩通常用于稳定具有几度误差的地球指向。空气动力扭矩在 LEO 中起主导作用并干扰控制系统,导致航天器在任务结束时反转。随后,作者论证了姿态预测的运动学和动力学框架。卫星的姿态通常由地球中心惯性系统(ECI)和身体固定框架之间的旋转来定义。这项工作中使用的欧拉角旋转序列是偏航-俯仰-滚转。姿态运动学方程通常用欧拉角或四元数来描述。
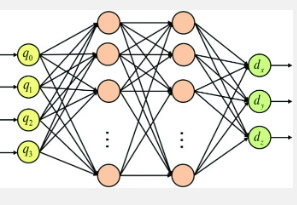
接下来,作者介绍了态度的过滤和确定方法。在开环预测中,卫星姿态的准确测量非常重要。一个微小的初始偏差可能导致预测结果逐渐偏离实际情况。长期以来估计卫星姿态最直接的方法是将动力学模型与观测数据相结合,然后根据最小方差原则计算最优估计值。在获得姿态估计后,通过扩展状态识别可以从原始数据中提取高阶未建模信息,这有助于改进动力学模型。因此,详细地,卫星状态的估计结果是通过扩展卡尔曼滤波器(EKF)得到的,然后通过扩展状态观测器(ESO)系列估计卫星的未建模扭矩。值得注意的是,在EKF过程中,过程噪声和测量噪声必须满足线性不相关、零均值和高斯分布的条件,否则滤波结果可能不准确。另一方面,不确定性估计,包括内部耦合、外部未知扰动和未建模的动力学,可以通过建立一个扩展状态观察器,用很少的观察信息来确定。在用 EKF 获得最优姿态估计后,引入一系列扩展状态观察器来提取隐藏在姿态中的高阶未建模信息。值得注意的是,在EKF过程中,过程噪声和测量噪声必须满足线性不相关、零均值和高斯分布的条件,否则滤波结果可能不准确。另一方面,不确定性估计,包括内部耦合、外部未知扰动和未建模的动力学,可以通过建立一个扩展状态观察器,用很少的观察信息来确定。在用 EKF 获得最优姿态估计后,引入一系列扩展状态观察器来提取隐藏在姿态中的高阶未建模信息。值得注意的是,在EKF过程中,过程噪声和测量噪声必须满足线性不相关、零均值和高斯分布的条件,否则滤波结果可能不准确。另一方面,不确定性估计,包括内部耦合、外部未知扰动和未建模的动力学,可以通过建立一个扩展状态观察器,用很少的观察信息来确定。在用 EKF 获得最优姿态估计后,引入一系列扩展状态观察器来提取隐藏在姿态中的高阶未建模信息。否则过滤结果可能不准确。另一方面,不确定性估计,包括内部耦合、外部未知扰动和未建模的动力学,可以通过建立一个扩展状态观察器,用很少的观察信息来确定。在用 EKF 获得最优姿态估计后,引入一系列扩展状态观察器来提取隐藏在姿态中的高阶未建模信息。否则过滤结果可能不准确。另一方面,不确定性估计,包括内部耦合、外部未知扰动和未建模的动力学,可以通过建立一个扩展状态观察器,用很少的观察信息来确定。在用 EKF 获得最优姿态估计后,引入一系列扩展状态观察器来提取隐藏在姿态中的高阶未建模信息。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
作为全部11支MotoGP车队及90% Moto2和Moto3车队的供应商,布雷博如今已成为顶级摩托车赛事的技术标杆。全球制...浏览全文>>
-
(2025 年 6 月 14 日,广州)6 月 14 日晚,华语摇滚乐坛标志性人物苏见信(信)携「尽兴而活」巡回...浏览全文>>
-
(2025 年 6 月 14 日,广州)6 月 14 日晚,华语摇滚乐坛标志性人物苏见信(信)携「尽兴而活」巡回...浏览全文>>
-
淮北威然是一款备受关注的商务MPV车型,以其宽敞的空间、豪华的内饰和卓越的舒适性吸引了众多消费者的目光。对...浏览全文>>
-
途观X作为上汽大众旗下的高端轿跑SUV,凭借其独特的设计和强劲的性能吸引了众多消费者的关注。在淮南地区,途...浏览全文>>
-
探岳X作为一款备受关注的中型SUV,凭借其时尚的设计和出色的性能,在市场上一直拥有不错的口碑。对于有意购买...浏览全文>>
-
2025款大众高尔夫GTI作为一款备受关注的高性能紧凑型轿车,在汽车市场中一直占据着重要地位。对于安徽亳州地区...浏览全文>>
-
池州长安启源C798作为一款备受关注的新能源车型,在市场上一直保持着较高的热度。随着消费者对新能源汽车需求...浏览全文>>
-
安徽池州地区的汽车市场近期迎来了一波喜讯,2025款高尔夫GTI的新车报价再次刷新了消费者的期待。这款备受瞩目...浏览全文>>
-
济南揽境作为一款备受关注的中大型SUV,其2025新款在外观设计、内饰配置以及动力性能方面均进行了全面升级。新...浏览全文>>
- 三星获得基于一天中的时间和天气的人工智能壁纸功能专利
- 如何将陶瓷融入室内设计
- 努萨海滨豪宅标价 2000 万美元
- 三星 Galaxy S25 Slim:泄露 iPhone 17 Air 竞争对手的旗舰相机规格
- AMD Radeon RX 8800 XT 参考设计在意外广告中泄露
- M3 Touring 与 RS4 Avant:终极冬季测试
- 量产版 Corvette 仅用了令人震惊的 2.3 秒就从 0 加速到 60 英里/小时
- 婴儿潮一代希望房价上涨
- 购买 OnePlus 12 可节省 250 美元
- 更新后的奥迪 E-tron GT:性能和价格均有所提高
- 达尔文市场将在 2025 年回暖
- Circle to Search 可能看起来更像 Apple Intelligence
- 2023年财富全球论坛荣耀对可折叠智能手机等的预测
- TECNO Spark Go 2024配备6.6英寸90Hz显示屏立体声扬声器在发布前预告
- 橡树城改造扩大到包括豪华生活的定制住宅
- Netflix将哈迪斯时空幻境和死亡之门添加到其游戏库中
- 联想Legion Go发布时间表已公布并列在该公司的官方网站上
- 苹果手表最佳优惠
- Stardock发布Fences5预览版现已适用于Windows11和10
- 揭晓Scout重新定义冒险骑行的终极步进电动自行车