首页 >> 信息 >
自动驾驶汽车的人类行为建模
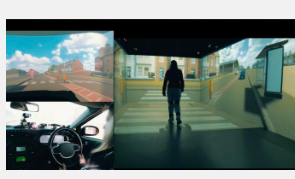
一项研究表明,人类心理学模型可以帮助自动驾驶汽车与道路上的人类司机互动。Gustav Markkula 及其同事将多个计算心理模型组合成一个主模型,以模拟试图穿过繁忙道路的行人以及该道路上的人类驾驶员。该模型的目标是捕获导致观察到的行为的潜在认知机制。贝叶斯感知、心理理论、行为博弈论、行动方案的长期评估和证据积累决策的计算模型被整合起来,以预测在实际交通中观察到的微妙行为,例如在让行的汽车前面穿过之前的犹豫以夸张的方式停车,向行人发出汽车让行的信号,或者加速汽车以阻止行人过马路的机会。由此产生的模型还准确预测了 32 对在驾驶员-行人模拟器中作为驾驶员和行人互动的参与者的过马路行为。然而,作者指出,这种穿越情况几乎没有触及现实世界驾驶的表面。准确地模拟交通中人与人之间的无数交互所需的复杂性将需要大量的进一步工作。
作者表示,机器学习可能有助于对超出机械建模当前限制的行为进行建模,并且将这两种方法结合起来特别有前途。然而,作者指出,这种穿越情况几乎没有触及现实世界驾驶的表面。准确地模拟交通中人与人之间的无数交互所需的复杂性将需要大量的进一步工作。作者表示,机器学习可能有助于对超出机械建模当前限制的行为进行建模,并且将这两种方法结合起来特别有前途。然而,作者指出,这种穿越情况几乎没有触及现实世界驾驶的表面。准确地模拟交通中人与人之间的无数交互所需的复杂性将需要大量的进一步工作。作者表示,机器学习可能有助于对超出机械建模当前限制的行为进行建模,并且将这两种方法结合起来特别有前途。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
分享:
相关阅读
最新文章
-
作为全部11支MotoGP车队及90% Moto2和Moto3车队的供应商,布雷博如今已成为顶级摩托车赛事的技术标杆。全球制...浏览全文>>
-
(2025 年 6 月 14 日,广州)6 月 14 日晚,华语摇滚乐坛标志性人物苏见信(信)携「尽兴而活」巡回...浏览全文>>
-
(2025 年 6 月 14 日,广州)6 月 14 日晚,华语摇滚乐坛标志性人物苏见信(信)携「尽兴而活」巡回...浏览全文>>
-
淮北威然是一款备受关注的商务MPV车型,以其宽敞的空间、豪华的内饰和卓越的舒适性吸引了众多消费者的目光。对...浏览全文>>
-
途观X作为上汽大众旗下的高端轿跑SUV,凭借其独特的设计和强劲的性能吸引了众多消费者的关注。在淮南地区,途...浏览全文>>
-
探岳X作为一款备受关注的中型SUV,凭借其时尚的设计和出色的性能,在市场上一直拥有不错的口碑。对于有意购买...浏览全文>>
-
2025款大众高尔夫GTI作为一款备受关注的高性能紧凑型轿车,在汽车市场中一直占据着重要地位。对于安徽亳州地区...浏览全文>>
-
池州长安启源C798作为一款备受关注的新能源车型,在市场上一直保持着较高的热度。随着消费者对新能源汽车需求...浏览全文>>
-
安徽池州地区的汽车市场近期迎来了一波喜讯,2025款高尔夫GTI的新车报价再次刷新了消费者的期待。这款备受瞩目...浏览全文>>
-
济南揽境作为一款备受关注的中大型SUV,其2025新款在外观设计、内饰配置以及动力性能方面均进行了全面升级。新...浏览全文>>
大家爱看
频道推荐
站长推荐
- 三星获得基于一天中的时间和天气的人工智能壁纸功能专利
- 如何将陶瓷融入室内设计
- 努萨海滨豪宅标价 2000 万美元
- 三星 Galaxy S25 Slim:泄露 iPhone 17 Air 竞争对手的旗舰相机规格
- AMD Radeon RX 8800 XT 参考设计在意外广告中泄露
- M3 Touring 与 RS4 Avant:终极冬季测试
- 量产版 Corvette 仅用了令人震惊的 2.3 秒就从 0 加速到 60 英里/小时
- 婴儿潮一代希望房价上涨
- 购买 OnePlus 12 可节省 250 美元
- 更新后的奥迪 E-tron GT:性能和价格均有所提高
- 达尔文市场将在 2025 年回暖
- Circle to Search 可能看起来更像 Apple Intelligence
- 2023年财富全球论坛荣耀对可折叠智能手机等的预测
- TECNO Spark Go 2024配备6.6英寸90Hz显示屏立体声扬声器在发布前预告
- 橡树城改造扩大到包括豪华生活的定制住宅
- Netflix将哈迪斯时空幻境和死亡之门添加到其游戏库中
- 联想Legion Go发布时间表已公布并列在该公司的官方网站上
- 苹果手表最佳优惠
- Stardock发布Fences5预览版现已适用于Windows11和10
- 揭晓Scout重新定义冒险骑行的终极步进电动自行车